Dans le monde de l'aviation légère et des sports aériens, les planeurs occupent une place particulière en raison de leur dépendance à la météo et de leur capacité à glisser silencieusement à travers les cieux. Pour améliorer l'expérience de vol des planeurs et fournir aux pilotes des données essentielles en temps réel, mon projet de recherche de fin de bachelor en systèmes d’information et science des services s'est concentré sur la conception et la mise en œuvre d'un prototype de tracker de vol fait maison spécialement conçu pour ces aéronefs.
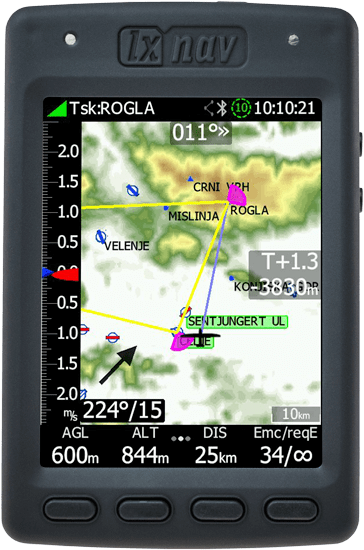
Les trackers de vol traditionnel que l’on trouve sur le marché sont relativement coûteux. Le prix de ces appareils se situe autour des 700 francs suisses. Grâce à la démocratisation des microcontrôleurs et microordinateur, ce travail de recherche se base sur la faisabilité de création d’un suiveur de vol fait maison.
Il faut avant tout commencé par choisir les composants appropriés, en tenant compte de facteurs tels que la taille, le poids, la consommation d'énergie et le prix. Les principaux éléments du tracker comprenaient un récepteur GPS, un baromètre et une unité centrale qui traite et stocke les données.
Conception du Tracker de Vol:
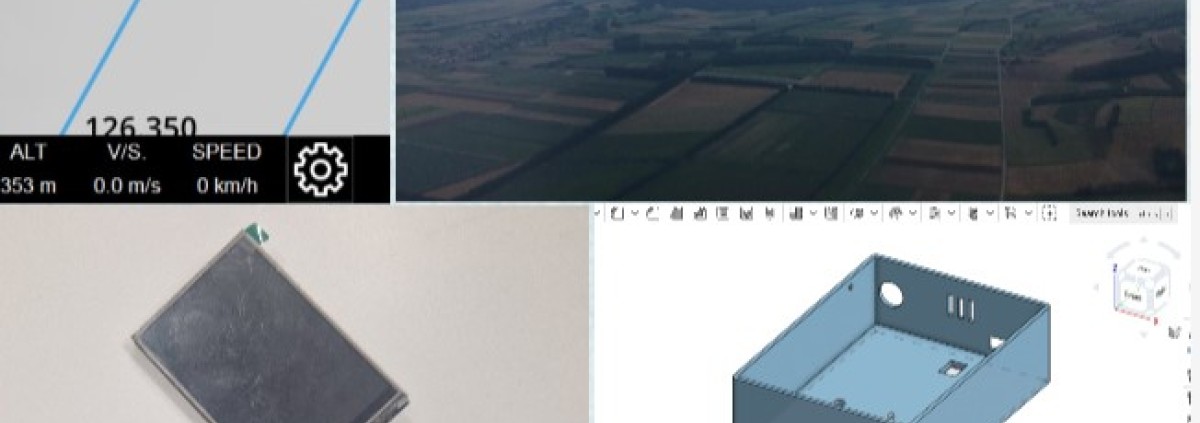
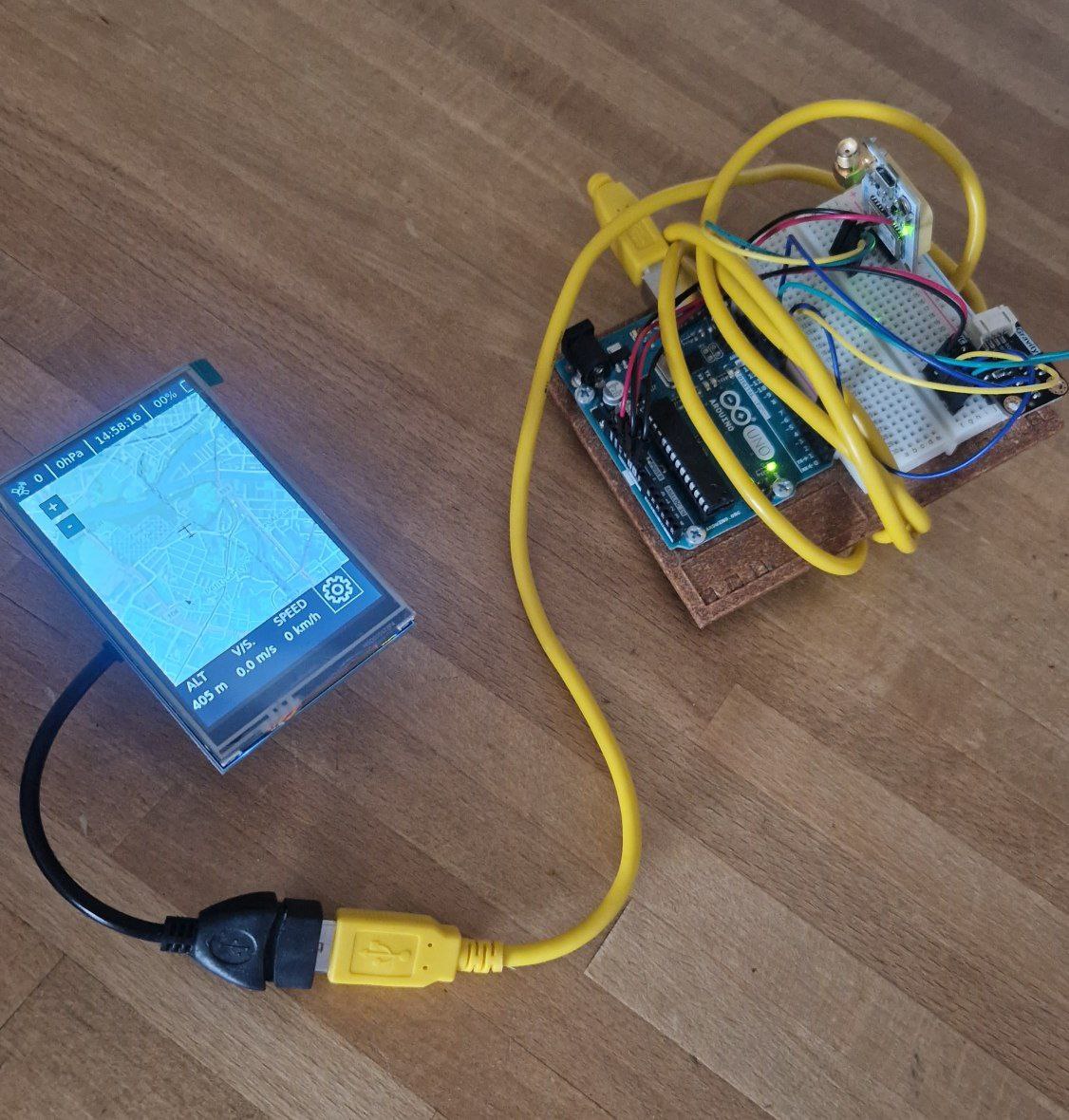
Le cœur du tracker de vol repose sur le Raspberry Pi Zero W et l'Arduino Micro, qui travaillent en tandem pour collecter, traiter et transmettre les données de vol. Le récepteur GPS captura la position actuelle du planeur, tandis que le baromètre mesurera l'altitude. Ces informations sont traitées par l'Arduino Micro et présentées sur l'écran tactile grâce au Raspberry Pi Zero W. Une batterie intégrée assure une alimentation autonome.

Fonctionnalités et Avantages:
Le tracker de vol fait maison comporte plusieurs fonctionnalités:
- Suivi en Temps Réel : Grâce à la combinaison du récepteur GPS et du Raspberry Pi Zero W, les pilotes et les observateurs au sol peuvent suivre le planeur en temps réel.
- Flexibilité : Le choix des composants, notamment le Raspberry Pi et l'Arduino, offre une flexibilité pour personnaliser les fonctionnalités en fonction des besoins spécifiques des pilotes.
- Coût Abordable : En utilisant des composants largement disponibles et abordables, le tracker de vol fait maison pourrait offrir une alternative économique aux solutions commerciales.
Open Source:
Le projet est ancré dans les valeurs de l'open source, encourageant le partage des connaissances et la collaboration. L’objectif est de fournir une documentation la plus complète possible, le code source et les guides de montage, permettant à chacun de construire son propre tracker de vol.

En utilisant des composants comme le Raspberry Pi, l'Arduino, un récepteur GPS et un baromètre, le but final est de fournir une solution abordable et adaptable pour les passionnés d'aviation.
De future publication vont suivre sur l'avancement du projet.