
Diversification des Tests : Tracker de Vol pour Planeurs

Une fois le prototype assemblé, il est impératif de soumettre cet appareil à une série de tests afin d'évaluer ses performances dans différentes situations. Les trois phases de test, à pied, à vélo et en avion léger, ont été planifiées pour garantir une évaluation du tracker et de ses capacités.
Pour rappel, le tracker a pour objectif de suivre le planeur en temps réel. Indiqué son altitude et sa vitesse verticale principalement.
Le tracker de vol enregistre les données essentielles de chaque vol. Ces données comprennent la latitude, la longitude, l'altitude et l'horodatage, toutes stockées de manière organisée dans un fichier CS (CSV). Ceci permet d'analyser la performance du suiveur de vol pour une future analyse, notament sur le site web GPS visualizer par exemple.
1er Test : À Pied
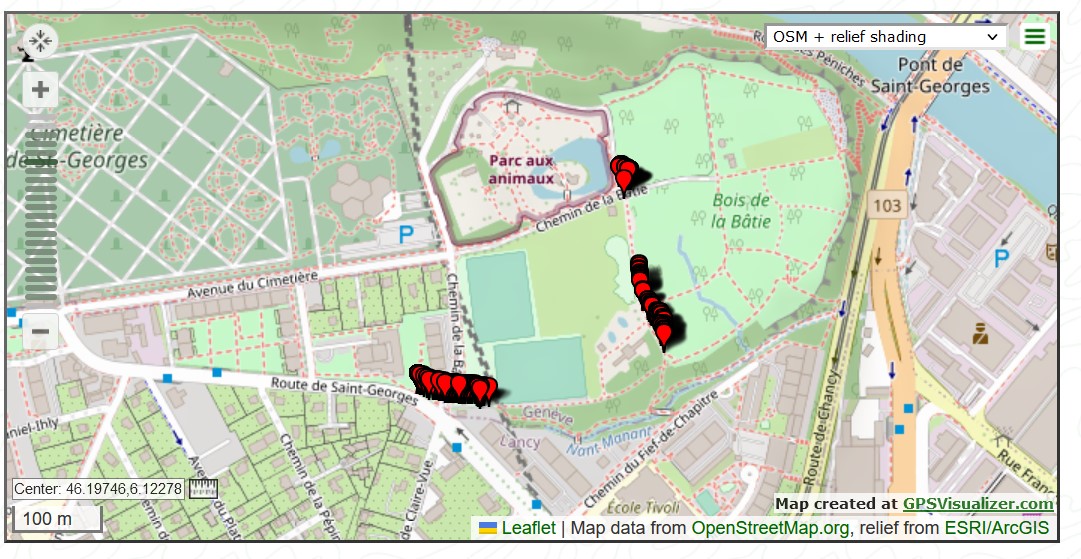
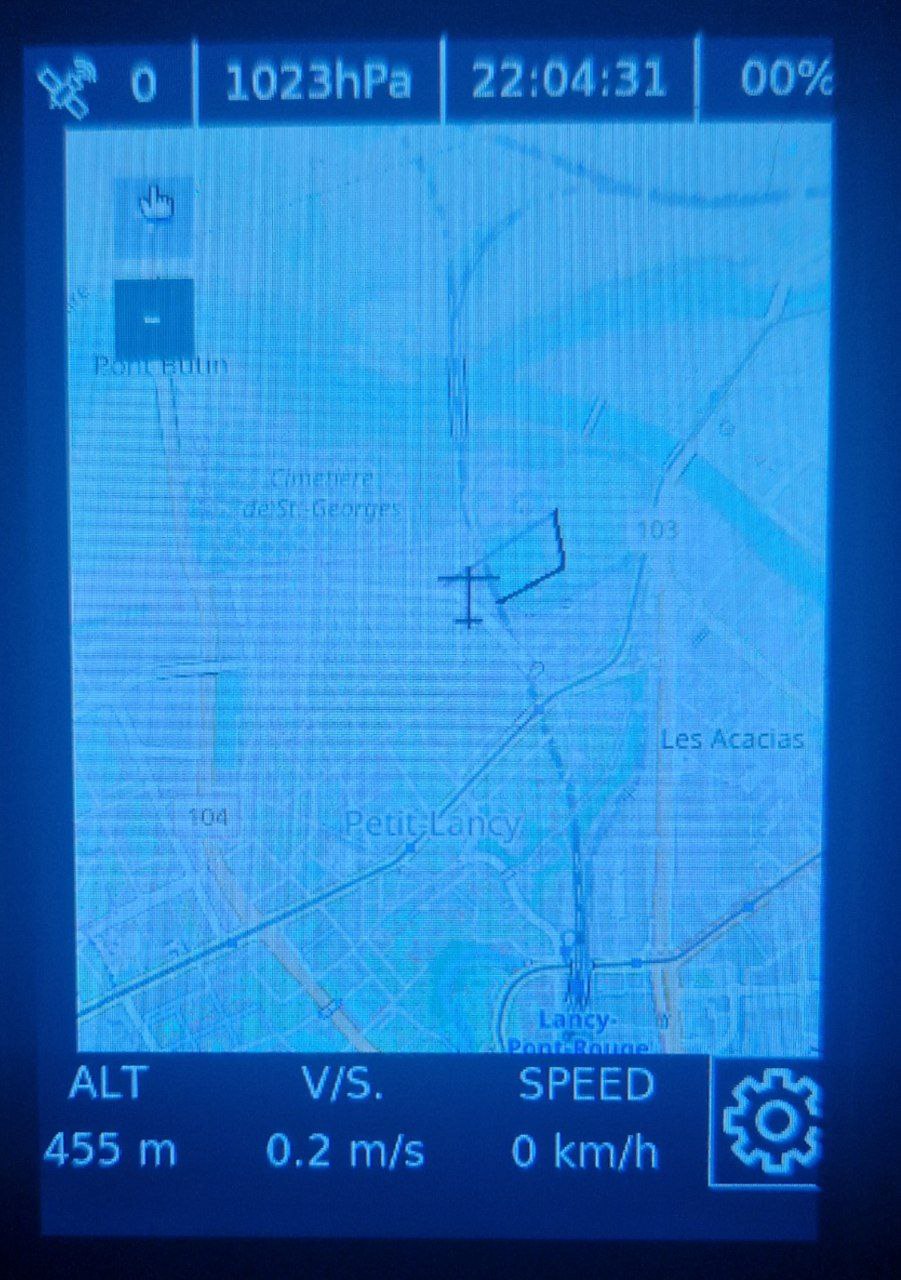
Le premier test à pied est un succès. Bien que le chemin tracé par le GPS ne soit pas particulièrement long, cela s'explique par la faible vitesse de déplacement de seulement 5 km/h. De manière attendue, la vitesse verticale n'a pas varié durant ce test, ce qui est tout à fait conforme aux attentes. Le GPS fonctionne malgré le fait qu’il a été testé en zone urbaine (Petit-Lancy). Les immeubles d’habitations pourraient bloquer la plupart des satellites de réception, mais le chemin est indiqué par le GPS est fidèle à la réalité du trajet du test.
Le trajet indiqué sur la photo de l’écran est court, mais le logiciel est calibré pour des parcours sur des grandes distances. Ce dernier mets à jour la position du planeur uniquement lorsqu’un certain seuil est dépassé.
Nous pouvons voir que les positions GPS sont réparties par « clusters ». Le fait que le test a été réaliser en zone urbaine pourrait expliquer cela. Les immeubles d’habitations auraient pu bloquer quelques signaux satellites.
Ces résultats confirment la précision et la fiabilité du GPS, même dans des conditions de déplacement à faible vitesse.
2ème Test : A Vélo
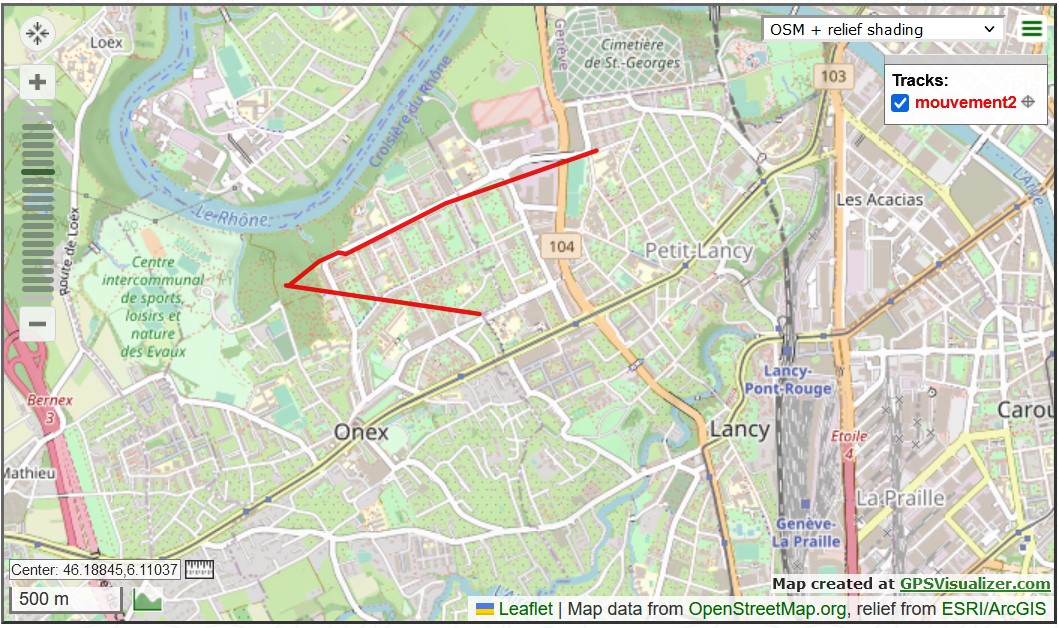
Le test à vélo a produit des résultats similaires, avec un suivi de la position et de l'altitude. Comme pour le test à pied, quelques pertes de signal GPS sporadiques ont été observées. Il est important de souligner que ces perturbations pourraient être attribuées à l'environnement urbain dans lequel le test a été effectué (quartier d’Onex).
Malgré ces perturbations occasionnelles, le tracker a continué à fonctionner de manière fiable dans des conditions exigeantes. Ces résultats prouvent qu’avec une plus grande vitesse, le tracker fonctionne tout de même. Un test en vol est à suivre.
3ème Test : En Avion
La dernière phase de test a placé le tracker de vol dans son élément naturel : l'aviation légère. Intégré à un avion moteur léger, le dispositif a été évalué lors de vols réels en avion.
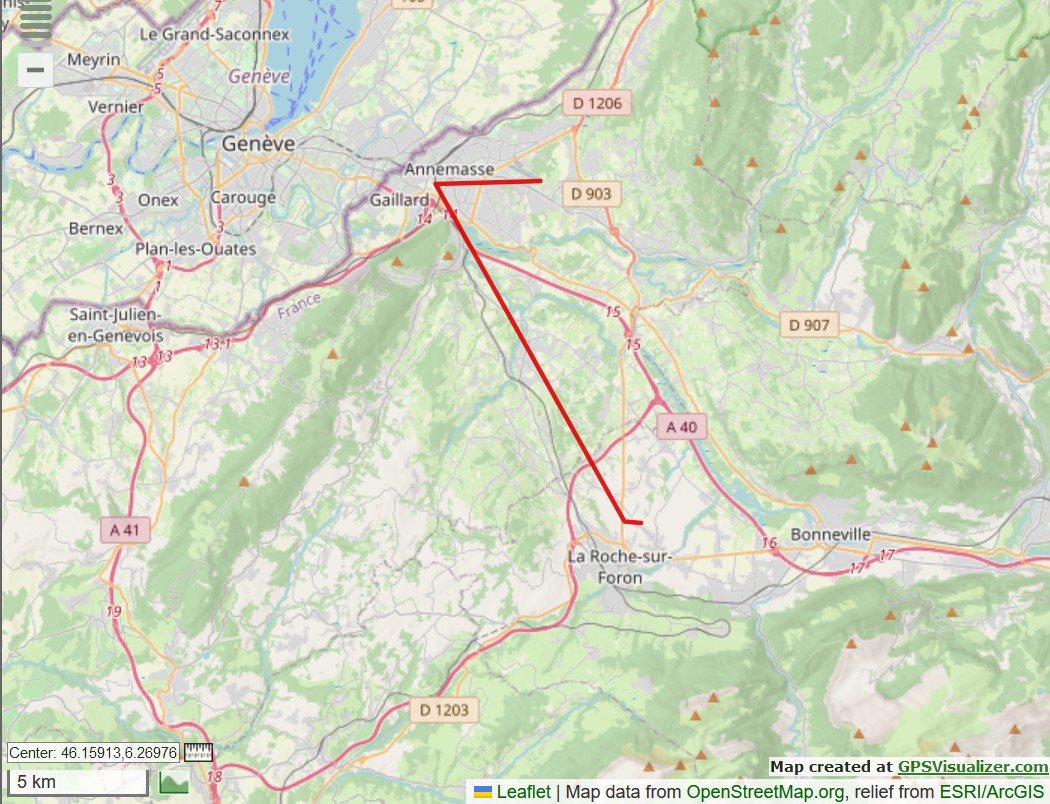
Lors du test en avion moteur, le tracker de vol a été soumis à une épreuve en survolant depuis l’aérodrome d’Annemasse, la région de la Roche-sur-Foron, puis Bonneville, à une altitude de 5000 pieds. Comme nous pouvons le voir sur le report de l'enregistrement du vol sur GPS Visualizer, il y a eu une perte de signal GPS au-dessus de la Roche-sur-Foron qui n'a été retrouvée par la suite. Cependant, malgré cette perte temporaire de données GPS, l'altimètre du tracker de vol a continué à indiquer avec précision l'altitude actuelle. Il est important de noter que l’indicateur de vitesse vertical du tracker indiquait également des résultats justes.
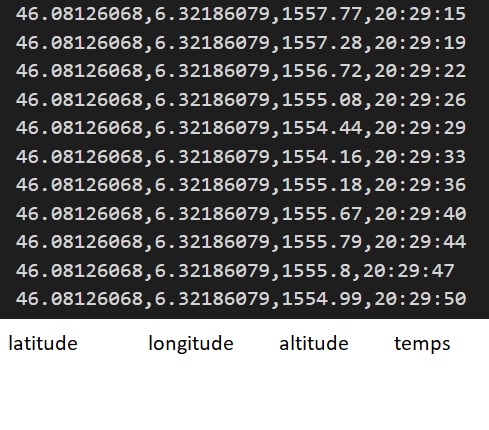
Une explication à la perte de signal GPS pourrait être la vitesse de l'aéronef. En effet, la perte de signal est apparue lorsque l'avion a fini sa montée et s'est mis en vol horizontal stabilisé à 5000 pieds. La vitesse de croisière de l'avion est de 210 km/h. Lorsque l'avion se déplace rapidement, le récepteur GPS peut avoir du mal à maintenir une liaison constante avec les satellites, entraînant ainsi des interruptions du signal. La dernière donnée enregistrée indique 1554 mètre ce qui correspond à environ 5000 pieds (voir image ci-dessous). Ceci pourrait confirmer cette explication.
Cependant, la vitesse de montée de l'avion moteur en question est d'environ de 165 km/h, la vitesse de moyenne d'un planeur tourne autour des 100 km/h. Donc en théorie, le signal ne devrait pas se perdre si le tracker est embarqué dans un planeur.
La calibration automatique de l’altimètre, grâce l’altitude donné par le GPS, est correcte. Celui-ci indiquait une pression de 1020hPa ce qui était la pression du jour dans la région (7 septembre 2023).
Une caractéristique du tracker de vol est sa capacité de calibration. Il utilise les données de l'altitude du GPS en comparant les mesures répétées (environ 20 fois) pour déterminer une altitude fiable, et ainsi une pression atmoshpérique locale.
Cette méthodologie de calibration assure une précision optimale dans le suivi de l'altitude, même dans des situations auxquelles la réception GPS peut être intermittente, comme cela a été observé lors du vol au-dessus de la Roche-sur-Foron.
Ces résultats sont très encourageants, car ils montrent que le tracker de vol est équipé pour maintenir des informations cruciales, telles que l'altitude, même en cas de perturbation de la réception GPS.

Conclusion des Tests
Les phases de test diversifiées ont solidement confirmé la fonctionnalité et la performance du tracker de vol. Qu'il s'agisse du déplacement à pied, à vélo ou en avion, le dispositif a fait preuve d'une collecte de données viables. Le choix des composants, notamment le Raspberry Pi Zero W et l'Arduino Micro, a assuré une flexibilité essentielle.
Les futurs développements se concentreront sur l'optimisation logiciel continue du tracker de vol et sur les pertes de signaux GPS occasionnels.
Voici un manuel d’instruction pour la reproductibilité du projet: ici
Voici le code informatique: ici
Limites du projet
Le logiciel de suivi de vol open source présente des fonctionnalités limitées à ses débuts. Les limites actuelles sont simplement le point de départ d'une évolution potentiellement continue. Mon expertise de vol à voile est encore limitée, il est donc difficile de lister toutes les fonctionnalités qui pourront être utiles à ce projet.
L'autonomie de la batterie est essentielle, surtout pour les vols longue distance. Ici, la durée de vie affichée par le constructeur de la batterie PiSugarS est de 5 à 6 heures. Les contraintes liées à la capacité de la batterie et à la consommation d'énergie peuvent donc limiter la durée suivie des vols.
Le Raspberry Pi Zero W est équipé d'un processeur ARM11 cadencé à 1 GHz et de 512 Mo de RAM, ce qui est considérablement moins puissant que les modèles Raspberry Pi plus récents. Cela peut limiter sa capacité à effectuer des tâches complexes en temps réel, telles que le traitement de données GPS en continu ou la genération de carte en temps réel. En effet, il y a un certain délai lors de la génération de la carte lorsqu'on selectionne différents niveaux de zoom.
La précision du GPS est un défi majeur auquel le projet est confronté. Les récepteurs GPS grand public ont leurs limites en termes de précision, et cette limitation peut affecter la qualité des données de position que nous pouvons fournir aux pilotes. Comme nous l’avons vu, les obstructions telles que les bâtiments ou les reliefs montagneux peuvent entraîner des fluctuations dans la précision du GPS. Cependant, il est important de noter que cette limitation est inhérente à la technologie GPS elle-même et n'est pas forcément spécifique au projet.
Les limites des connaissances et compétences individuelles dans le domaine du DIY (Do It Yourself), notamment en matière de soudure, d'électronique et de manipulation du matériel, peuvent constituer des défis pour ceux qui souhaitent entreprendre un projet tel que le tracker de vol open source. Ma peau en a fait les frais (brulures à cause du fer à souder ☹)